2024/02

[Perception] 카메라 캘리브레이션 실습 (camera calibration): opencv, intrinsic, extrinsic, checker(chess) board 활용
💡 본 문서는 '[Perception] 카메라 캘리브레이션 실습 (camera calibration): intrinsic, checker(chess) board 활용'에 대해 정리해놓은 글입니다.Checker board를 활용하여 Intrinsic Metrix를 구하기 위해 사용했던 코드 및 return값에 대해 정리하였으니 참고하시기 바랍니다.Intrinsic Metrix(K) 전체 코드import numpy as npimport cv2 as cvimport globwc = 8 - 1hc = 5 - 1square_size = 70 # QHD 7cmsquare_size = 52.5 # FHD 5.25cm# termination criteriacriteria = (cv.T..
[생각 정리] 골을 넣어야 훈련이 돼 (차두리 코치)
재밌게 해, 열심히 하고. 모르는 건 물어보고, 안 되는 건 계속해봐 지금 실수해도 돼. 지금 패스미스하고, 지금 잘 안 돼도 돼. 지금 잘하라고 하는 거 아니야 나중에 손흥민처럼 국가대표가 되고 프로가 갔을 때, 완벽하게 됐으면 좋겠다는 거지 지금 너네한태 모든 걸 완벽하게 바라지 않아. 너네 실수해도 되고 터치가 벗어나도 되고 슈팅이 빗나가도 돼. 하지만, 잘하기 위해 애쓰는 모습만 보여주면 돼. 알았지? 슈팅훈련을 왜 할까? 골 넣어야 해. 알았지? 아무리 거리가 가깝고, 아무리 쉬워도, 모든 건 다 골이 들어가야 해. 골이 들어가야 너네한태 훈련이 돼. [Youtube] 골을 넣어야 훈련이 돼 (차두리 코치): https://youtube.com/shorts/hwi6rr9fes8?si=Ver_aj..
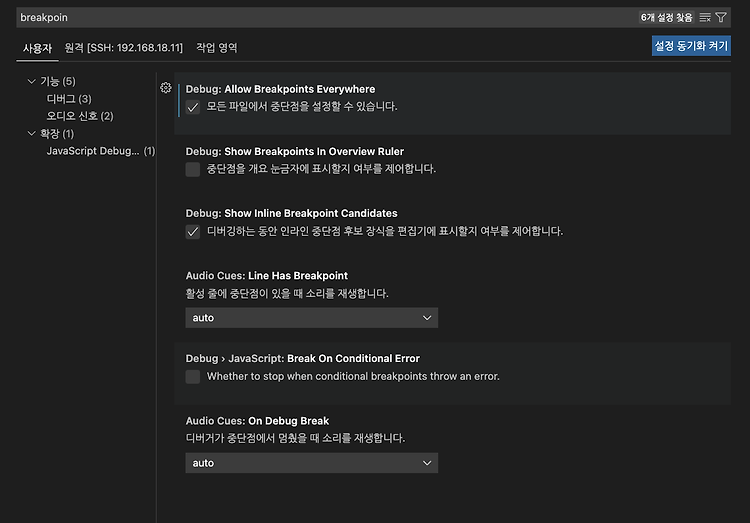
[IDE] VSCode Python 디버깅 환경 세팅(launch.json): feat. 모든 중단점에서 멈추도록
💡 본 문서는 Visual Studio Code를 활용한 Python 디버깅 환경 세팅 방법에 대해 소개합니다. 운영체제 별로 지원되는 컴파일러에 차이가 있어 운영체제별로 일부 상이할 수 있으니 본인의 운영체제를 확인하고 그에 맞춰서 진행하시기 바랍니다. 미리 알아야 할 점 (주의사항) VSCode에서 디버깅시 프로젝트의 상위에 있는 .vscode/폴더 내에 task.json과 launch.json을 아래와 유사하게 구성합니다. VScode의 디버깅을 실행하면 launch.json이 실행되는데, 이때 preLaunchTask 라벨이 있다면 task.json에서 label이 동일한 것을 찾고 task.json 작업을 실행한 후 launch.json이 실행합니다. 그래서 C++의 디버깅 환경을 세팅할 경우,..

[Deploy] ONNX: 다른 DNN 프레임워크 간 모델 호환 포멧(pytorch, tensorflow, ...)
💡 본 문서는 '[Perception] ONNX: 다른 DNN 프레임워크 간 모델 호환 포멧(pytorch, tensorflow, ...)'에 대해 정리해놓은 글입니다.1. PyTorch, ONNX, TensorRT 비교1) PyTorch 2.0언젠가부터 Tensorflow를 앞지르고 가장 인기있는 Deep Learning Framework이 된 PyTorch가 2022년 12월에 새로운 버전을 공개했습니다. 이 글에서 알아야 할 중요한 부분은 PyTorch는 너무 Pythonic해서 문제라는 것입니다.Python의 특징그럼 Pythonic 하다는 게 뭐냐?간결성 / 가독성: User friendly하게 작성하기 때문에 코드가 직관적이고 over-engineering을 막을 수 있습니다...