2024/02/10
[Perception] 포인트 클라우드(Point Cloud): PCL PCD
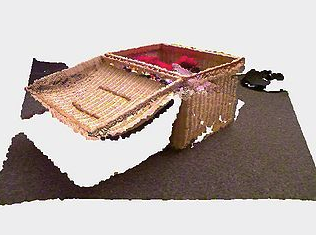
💡 본 문서는 '[Perception] 포인트 클라우드(Point Cloud): PCL PCD'에 대해 정리해놓은 글입니다. ~~~정리하였으니 참고하시기 바랍니다. 1. Point Cloud Lidar 센서, RGB-D센서 등으로 수집되는 데이터를 의미한다. 이러한 센서들은 아래 그림처럼 물체에 빛/신호를 보내서 돌아오는 시간을 기록하여 각 빛/신호 당 거리 정보를 계산하고, 하나의 포인트(점)을 생성한다. Point Cloud 란? 포인트 클라우드는 3차원 공간상에 퍼져 있는 여러 포인트(Point)의 집합(set cloud)를 의미한다. 순서가 없다 위치 정보를 가지고 있다 {x, y, z} 종종 그 외의 정보도 가지고 있다 (Color, Reflectance, Descriptor) Lidar 센서와..
[Perception] Python OpenCV를 이용한 영상 재생과 Frame Rate (FPS) 조절
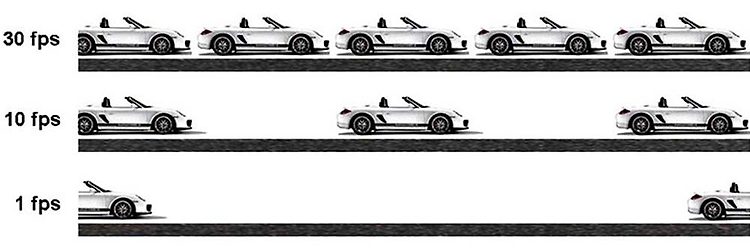
💡 본 문서는 '[Perception] Python OpenCV를 이용한 영상 재생과 Frame Rate (FPS) 조절'에 대해 정리해놓은 글입니다. 연속된 이미지나 비디오 파일을 다룰때 재생되는 프레임의 속도를 조절해야하는 Task가 발생하게 됩니다. 특히, 실시간으로 이미지 프로세싱을 하게 될 경우, 모든 프레임에 알고리즘을 적용하게 되면 연산으로 인해 재생이 지연되는 상황이 발생하게 됩니다. 지연시간 및 처리시간을 측정하기 위한 내용을 정리하였으니 참고하시기 바랍니다. 1초 동안 10개의 프레임(이미지)이 재생되는 영상이 있다고 가정해보겠습니다. 단일 프레임 연산이 1초가 걸리는 딥러닝 알고리즘을 적용하게되면, 영상은 1초이지만 10초의 시간동안 영상이 재생되게 됩니다. 물론 모든 프레임에 대해 ..