Study: Robotics(Robot)
[ROS] ROS URDF vs. Gazebo SDF: Link Pose, Joint Pose, Visual & Collision
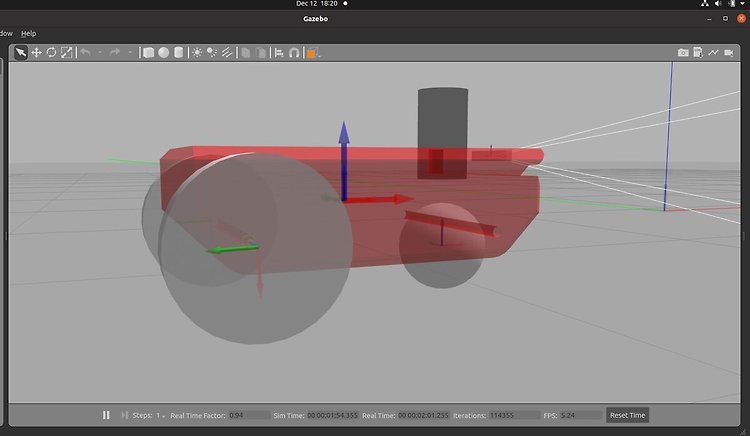
💡 본 문서는 'ROS URDF vs. Gazebo SDF: Link Pose, Joint Pose, Visual & Collision'에 대해 정리해놓은 글입니다. ROS 2 및 Gazebo를 사용하여 시뮬레이션용 로봇을 만드는 가장 혼란스러운 개념 중 하나 는 URDF 및 SDF를 사용하여 로봇의 링크 및 관절 에 대한 좌표 프레임을 설정하는 방법입니다 . 이 튜토리얼에서는 링크와 관절의 포즈가 일반적인 URDF 파일과 SDF 파일 내에서 정의되는 방식을 비교하고 대조해 보겠습니다. 1. Prerequisites 무엇보다 URDF를 이해하기 위해서는 모바일 로봇 좌표계를 이해해야합니다. 해당 내용을 '[ROS] ROS TF 좌표계 및 변환'에 정리해놓았으니 참고하시기 바랍니다. 1) What is a..

[ROS] ROS TF 좌표계 및 변환
💡 본 문서는 'ROS TF 좌표계 및 변환'에 대해 정리해놓은 글입니다. 이 튜토리얼에서는 ROS를 사용하는 모바일 로봇의 표준 좌표계(예: x,y,z 축 )의 기본 사항을 다룹니다. 또한 기본적인 2륜 차동 구동 모바일 로봇 의 좌표계를 설정하는 방법도 다룰 것이니 참고하시기 바랍니다. 1. Why Coordinate Frames Are Important? 바퀴 달린 로봇 위에 LIDAR가 장착되어 있다고 가정해 보겠습니다. LIDAR의 임무는 환경 내 물체까지의 거리에 대한 데이터를 제공하는 것입니다. 하지만 여기서 LIDAR는 보통 로봇의 중심점에 위치하지 않습니다. 따라서 실제 시나리오에서는 로봇이 환경에서 이동할 때 장애물을 피하려면 LIDAR 좌표계에서 감지된 객체의 좌표를 로봇 베이스 프레..
[Positioning] ROS GPS(WGS84) to UTM 좌표 변환하기
💡 본 문서는 'ROS GPS(WGS84) to UTM 좌표 변환하기'에 대해 정리해놓은 글입니다. GPS(WGS84), UTM 좌표계 자체에 대한 이해부터 이를 변환하는 라이브러리 사용방법까지 정리하였으니 참고하시기 바랍니다. 1. 좌표계 이해 1) GPS(WGS84) WGS는 World Gedetic System coordinate의 약어이며, WGS84 좌표계에서 84는 84년도에 제정된 좌표계입니다. 이는 타원체 모양의 지구상 위치를 표현하기 위한 좌표계로, 적도와 본초자오선이 교차하는 점을 기준점(0.0º, 0.0º)으로 합니다. 따라서 표현 자체는 정확하나, 타원체 자체에서의 위치를 표현하기에 면적 거리를 계산하는 데 어려움을 겪을 수 있습니다. 2) UTM UTM 좌표계는 Universal ..