![[ROS] Why ROS2? (feat. ROS1 vs ROS2)](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FJgmnW%2FbtrSsmJShS9%2FgcE4oG385kXhhrvUedo5GK%2Fimg.png)
반응형
💡 본 문서는 'Why ROS2?'에 대해 정리해놓은 글입니다.
ROS2를 소개하기에는 8년 이상 개발되어 많이 늦은감은 있지만, 현 상황에서 ROS1이 아닌 ROS2를 공부해야하는 이유를 정리하였으니 참고하시기 바랍니다.
1. ROS1 VS ROS2
1.1 ROS1 vs ROS2 (홍보용: 간략한 기능 위주)

1.2 ROS1 vs ROS2 (개발자용: 세부 기능 및 지원 플렛폼)
2. ROS Distro 별 사용률
2.1 ROS Distro 별 사용률 (개발자 관점: Commit 수)
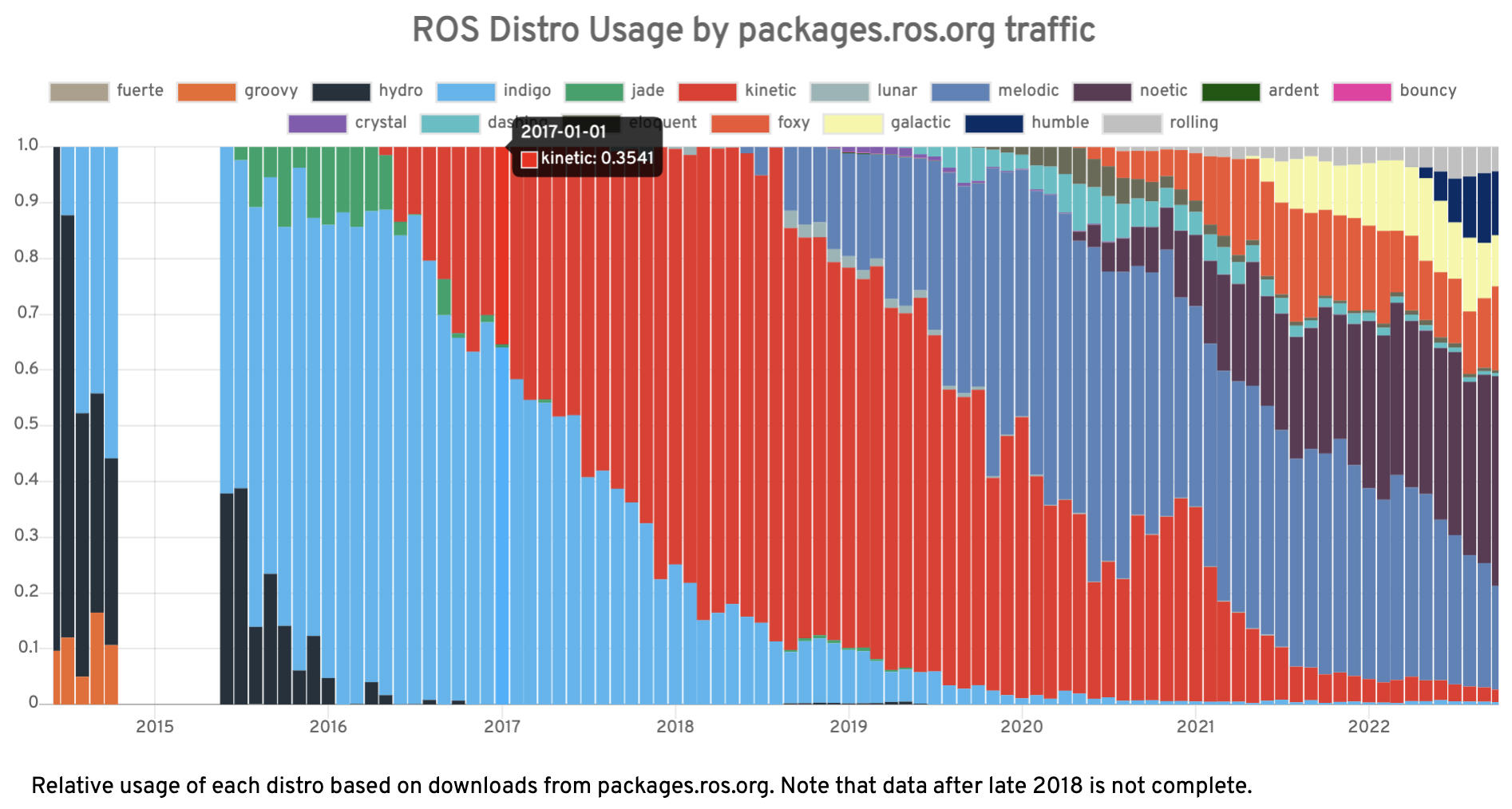
2.2 ROS Distro 별 사용률 (사용자 관점: package의 트래픽)
3. 마무리
- ROS1는 2020년 마지막 버전을 공식 릴리즈하였으며, EOL의 경우 2025년이면 지원 종료됨
- ROS2에서는 ROS1에서 지원하지 않는 여러 기능을 지원하고 있으며 실시간 운영이 가능해짐
- 80%이상의 개발자가 ROS2에 관심을 갖고 있으며, 현재 배포판의 사용비율도 40%이상이 ROS2로 구현되어 있음
- 커뮤니티와 회사에서 ROS2에 관심을 갖고 있으며 RosCon에서도 ROS2를 언급하는 비중이 높아짐
- 따라서 ROS2를 선택하여 공부해야하며, ROS1을 사용하던 개발자의 경우에도 ROS2를 고려해야함
참고
- [ROS] ROS Distro Maintenance by rosdistro commits: https://metrics.ros.org/rosdistro_rosdistro.html
- [ROS] ROS Distro Usage by packages.ros.org traffic: https://metrics.ros.org/packages_rosdistro.html
- [Blog] 003 왜? 'ROS 2'로 가야하는가?(ROS 2 사용률, 관심도, 컨셉과 특징): https://cafe.naver.com/openrt/23868
- [Blog] 004 ROS 2의 중요 컨셉과 특징(Why ROS2?): https://cafe.naver.com/openrt/23889
- [Blog] 005 ROS 1과 2의 차이점을 통해 알아보는 ROS 2의 특징: https://cafe.naver.com/openrt/23965
반응형
'Study: Robotics(Robot) > Robot: ROS(Robot Operating Sytem)' 카테고리의 다른 글
| [ROS] ROS URDF vs. Gazebo SDF: Link Pose, Joint Pose, Visual & Collision (0) | 2023.10.27 |
|---|---|
| [ROS] ROS TF 좌표계 및 변환 (0) | 2023.10.26 |
| [ROS] ROS rosrun 실행파일 만들기(python, cpp) (0) | 2023.10.12 |
| [ROS] ROS Docker Official Image, Docker Compose 파일 (0) | 2023.05.03 |
| [ROS] Robot Operating System 개념 정리 (0) | 2022.06.06 |