[Autonomous] 자율주행차의 5단계 및 책임소재의 정의 (SAE J3016 Toxanomy)
💡 본 문서는 '자율주행차의 5단계 및 책임소재의 정의' 포스팅을 바탕으로 작성한 글이니 참고하시기 바랍니다.
일반적으로 자율주행차의 5단계에 대해 다음과 같이 정의할 수 있다. 본 정의는 SAE-J3016(Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles)과 북미자동차 공업협의 NHTSA (National Highway Traffic Safety Administration)의 기준에 따라 정의한 것이다.
먼저 단계별 차이점을 설명하기 전에, 현재 상업적으로 출시되어 있는 자율주행 모드 및 ADAS 기능을 가진 모든 자동차는 Level 2를 넘을 수 없다. 왜냐하면 Level 3부터는 차량주행(종방향/횡방향 동작) 및 차량의 자동주행 모드에서 발생하는 우발 상황에 대해 1차적으로는 차량(시스템)이 반응을 해야하고, 최종적으로 운전자가 책임을 져야 하기 때문이다. 즉 Level 3부터는 차량(시스템)이 일부 책임을 져야 하기때문에 이 "책임소재"에 대한 부분이 아직 법규적인 부분과, 보험적인 부분이 명확하게 제도화 되지 않았기 때문이다. 왜 그런지에 대해서는 아래에 자세하기 설명하고 있다.
자율주행 5단계(1~5단계)

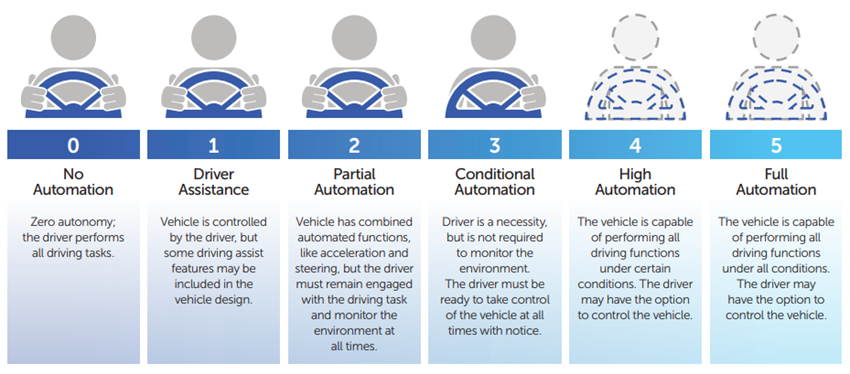
0단계 : 모든 운전과 관련된 조작을 운전자가 직접 담당하고 책임을 진다.
1단계 : 운전자 모든 책임을 지고, 차량의 일부 동작을 자동화 시스템(ADAS 등)을 통해 주행한다. 단 여기서 차량의 일부 동작이라고 하면, 종방향 주행(가속, 감속 및 앞차와 차간 거리 유지 등)과 횡방향 주행(차선 유지 및 변경 등) 중, 종방향 또는 횡방향 부분 중 하나의 동작만을 시스템(ADAS 등)을 통해 주행이 가능한 레벨이다.
2단계 : 운전자 모든 책임을 지고, 차량의 동작을 자동화 시스템(ADAS 등)을 통해 주행한다. 단 여기서 차량의 동작이라고 하면, 종방향 주행(가속, 감속 및 앞차와 차간 거리 유지 등)과 횡방향 주행(차선 유지 및 변경 등) 2가지 동작 모두룰 시스템(ADAS 등)을 통해 주행한다. 즉, 2단계가 1단계와의 가장 큰 차이점은 차량이 직진동작과 횡동작 모두를 차량 시스템이 제어한다는 점이다. 지금 많이 출시되어 있는 HDA(Highway Driving Assisst : 고속도로 운전 보조) 등이 좋은 예이다.
3단계 : 차량 시스템이 제한된 구간에서 차량의 모든 주행을 책임지도 동작한다. 하지만, 위급한 상황 발생시는 항상 운전가가 위급상황을 회피 가능하도록 모니터링 하고 운전제어권을 가지고 올 수 있어야 한다.
4단계 : 3단계와 마찬가지로 차량 시스템이 제한된 구간에서 차량의 모든 주행을 책임지도 동작한다. 단, 위급 상황이 발생하더라도 차량 시스템이 스스로 책임을 지고 위험을 회피 가능하도록 동작해야 한다. 만약의 경우를 대비하여 운전가 운전제어권을 가지고 올 수 있으면 된다.
5단계 : 5단계는 4단계의 차량이 모든 동작 및 모든 위험상황 회피 가하도록 동작하는 구간에 제한이 없다는 것이다. 즉, 운전가 필요없이 모든 구간(예, 공사구간, 새로 만들어 도로, Pothole, 모든 악천후 등의 기상조건 등)에 자율 주행이 가능해애 한다.
사실 2 단계의 HDA(Highway Driving Assisst)모드부터는 차량의 인식-판단-제어와 관련하여 Deep learning 및 Artificial Intelligence 기술이 들어가나, 3단계 부터 자율 주행 자동차는 말 그대로 지능을 갖는 단계로, 자동차의 주행시 발생하는 돌발 동작, 갑자기 전방 차량의 속도를 줄이거나, 급작스러운 끼어들음, 도로상의 장애물 등에 자동차의 시스템이 일차적으로 반응하고 동작해야 한다. 물론 3단계에서는 시스템의 이러한 상황을 운전자가 항상 모니터링 해야하며, 시스템이 반응이 불가능한 경우는 운전자가 직접 운전을 통해 이러한 상황을 회피해야 한다.
그리고 사실 3단계와 4단계의 차이, 4단계와 5단계의 차이가 명확하지 않을 수 있지만, 이러한 부분은 아래 J3016의 Texanomy를 활용한 설명을 통해 명확한 차이를 알 수 있다.
[J3016 Texanomy 기준 정리]
J3016에서 정의하고 있는 Taxanomy에서 자율주행차는 차량 자체라기보다는 자동주행시스템(ADS : Automated Driving System)이라고 정의 하고 있다, 하지만 여기서는 기술적인 정의보다 자율주행차의 개념정의를 위해 그냥 자율주행차라고 하겠다. 아래 그림과 같이 자율주행 모드에서 Driving 임무 수행의 schemantic view를 제공하고 있다. 아래 그림과 설명들을 이해한다면 자율주행의 3단계, 4단계, 5단계를 정확하게 이해 할 수 있다.

위의 그림과 같이 안쪽 회색 부분은 차량 시스템의 내부의 동작을 표현한 것이다, 그중 안쪽 붉은색 점선박스의 Lateral vehicle motion contorl은 차량의 횡방향 제어(차선 유지, 차선 변경 등)와 관련된 동작이며, Longitudinal vehicle contorl은 차량의 종방향 제어(가속, 감속, 차량 간경 유지 등)아 관련된 동작이다. 즉 위에서 종방향/횡방향 제어가 동시에 가능한 Level 2의 주요 기능이다. (안쪽 붉은색 영억)
여기서 차량의 동작 중 OEDR(Object & Event Detection and Response)이라는 개념이 등장한다. OEDR은 차량의 횡방향/종방향 주행 시, 예를들어 전방 차량의 급감속, 갑작스런 끼어듬, 예상되지 않은 공사구간 등의 출현 시 이러한 이벤트 상황을 감지하고 속도를 줄이거나, 공사구간의 도를 판단하여 주행 여부 등을 결정 및 판단을 하는 영역이다. 이러한 OEDR과 Later, Longitudinal Motion 동작이 합쳐지면서, Level 3로 발전한다. (바깥쪽 붉은색 영역)
추가로, 이러한 Lateral Motion, Longitudinal Motion, OEDR 등의 유기적으로 움직이고 동작하는 것을 DDT(Dynamic Driving Task)라고 한다. 즉 차량이 고속도로 상황에서 어댑티브 크루즈 컨트롤 상황에서, 차선을 유지하고, 앞에 발생한 적절한 이벤트들에 반응하여 동작한는 차량의 거동 및 동작에 관련된 부분을 DDT라고 한다. (전체 회색 영역)
마지막으로 가장 중요한 ODD(Operatonal Desing Domain)의 개념으로, 자율주행차가 주행하고자하는 시간, 구간, 영역 등을 의미한다. 즉 대표적으로 HDA(Highway Driving Assist)는 ODD가 고속도로가 될 수 있다. 물론 ODD는 구간 뿐만 아니라 시간(낮, 밤, 새벽, 저녁 등)과 날씨(맑은날, 흐린날, 눈오는날, 비오는 날, 안개 많은 날 등)을 포함한다.
그래서 Level 5와 Level 4의 가장 큰 차이는 Level 5는 ODD가 제한이 없다는 점이다, 즉 어떤 장소, 시간, 날씨에 개의치 않고 주행 가능하며, Level 0에서의 운전가 하는 하는 모든 동작을 차량 시스템이 수행한다는 것이다.
그러나 Level 4는 Levle 5와 마찬가지로 이러한 동작의 제약은 없지만, ODD의 제약이 존재한다는 것이다. 즉, 검증되고 확인된 구간 및 날씨에서만 가능한 조건이 생기는 수준인 것이다.
아래 표를 보면 좀 더 명확하게 구분이 가능하다.
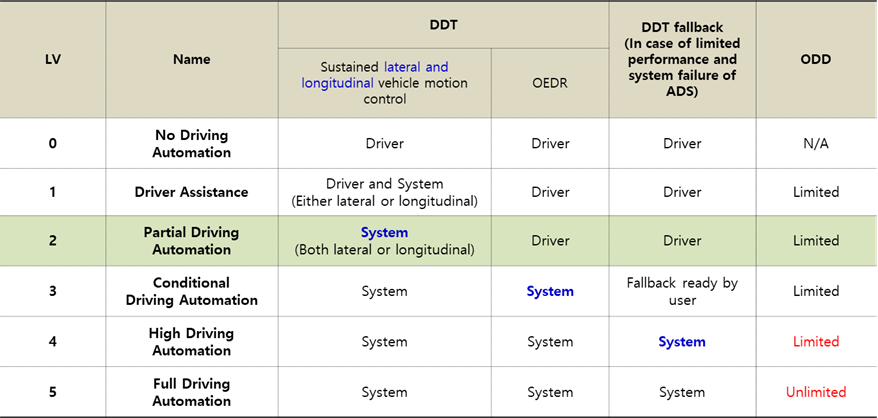
표에 대한 추가적인 설명은 DDT Fallback 개념의 적용을 통한 자율주행차량의 동작모드에 대한 설명을 다음 글에서 올리도록 할 예정입니다.
ADS (Automated Driving System) : Driving Automation System and the level 3~5 specific term
DDT (Dynamic Driving Task) : Behavior and maneuver of driving
ODD (Operational Design Domain) : The design domain for automatic driving (level 3,4, or 5)
OEDR (Object & Event Detection and Response) : Sub task of DDT including monitoring and response
참고
- [SAE] SAE Levels of Driving Automation™ Refined for Clarity and International Audience: https://www.sae.org/blog/sae-j3016-update
- [Blog] 자율주행차의 5단계 및 책임소재의 정의: https://innospi.tistory.com/49