[Positioning] 위성항법시스템(GNSS) 정리(5): GPS 의사거리 측정 - 코드 기반(시간), 위상 기반(위치)
💡 본 문서는 '위성항법시스템(GNSS) 정리(5): GPS 의사거리 측정 - 코드 기반(시간), 위상 기반(위치)'에 대해 정리해놓은 글입니다.
이전 내용에서는 '위성항법시스템(GNSS)'의 이론에 대해 정리해보았으며, 여기서 다룬 측위기법을 기반으로 오차보정하는 방법 및 실제 사용에 대해 정리하였으니 참고하시기 바랍니다.
1. GPS 의사 거리
1.1. 의사 거리 측정
의사 거리 (Pseudo-range)는 GPS 위성과 수신기 간의 거리라 볼 수 있는데, 의사거리를 '코드 기반(시간 사용)'과 '위상 기반(위치 사용)' 거리 측정 방법 둘에 의해 계산할 수 있다.
코드 기반 거리 측정 방법(시간 사용)에서는 위성이 방사한 C/A코드와 P코드 등을 수신해, 수신기 자체가 발생시킨 동일한 코드와의 시간차이로 거리를 계산한다. (의사거리) = (전파 속도) X (시간 차)인 것이다. 주로 저가 스마트폰 내장 GPS 등 저가 수신기에서만 사용한다.
위상 기반 거리 측정 방법(위치 사용) 혹은 반송파 기반 거리 측정 방법은 아래와 같은 원리를 가진다.
의사 랜덤 코드를 사각함수로 나타냈을 때 +1 혹은 -1의 시간 간격(chip)을 , 칩의 시간 폭(chip width)라고 한다. 위성과 수신기 사이의 PRN 코드 칩의 개수를 , 즉 신호가 수신될 때 가 몇 개 있었는지를 라 하자.
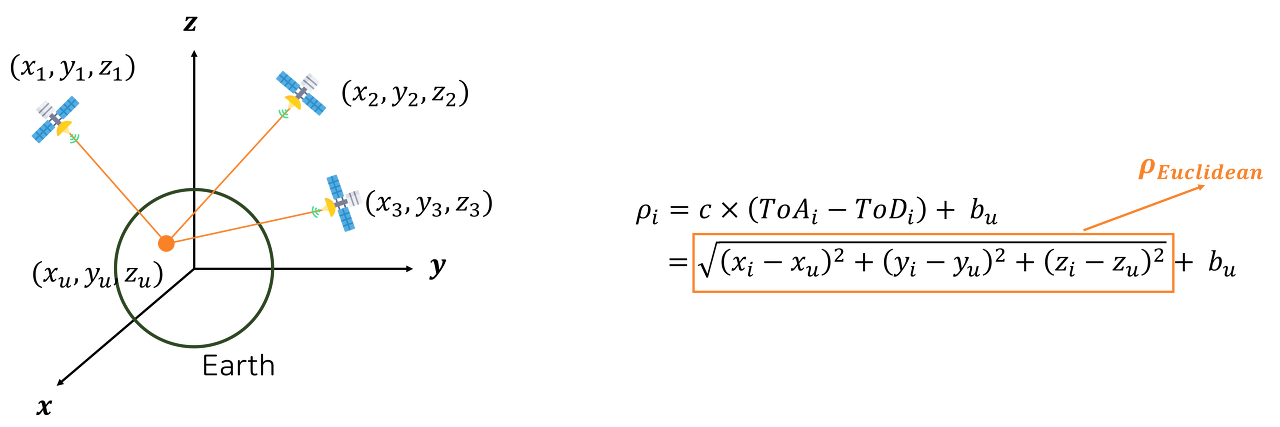
그렇다면 빛의 속도를 라 할 때, (에러가 없다 하면) 실제 거리 는 가 된다. 는 라고도 할 수 있는데 는 Time of Arrival, 수신기가 신호를 수신한 시각이며, 는 Time of Departure, 위성이 신호를 방사한 시간이다. 따라서, 위성에서 방사한 시간에서 수신기가 수신한 시간의 차에 빛의 속도를 곱하면 거리가 된다.

1.2. 의사 거리 오차
그러나 위성은 계속 움직이고 수신기마다 가진 시계과 시계의 오류가 있다. 따라서 GPS에서의 거리 계산은 정확하거나 간단하지 않다.
특정 시각에서 위성의 위치를 계산할 수는 있다. 위성이 방사하는 메시지 중 궤도 이력(ephemeris) 데이터가 있는데, 이를 이용한다. 수신기는 자신이 받은 신호가 얼마만큼의 시간을 거쳐 수신되었는지 계산하고, 위성에서 방사된 시간을 역추적해 위성의 위치를 구할 수 있다. 그러나 수신기 시계 자체의 오차가 있다면 에 에러를 포함하므로 문제가 된다.
이를 보정하여 사용자와 위성 간 의사거리 (Pseudo-range), 즉 시각 오차가 포함된 거리를 계산할 수 있다.
를 m 단위의 시각(clock) 에러에 빛의 속도 를 곱한 것이라고 하자. 예를 들어, 1초 에러라면 이므로 이다. 이 를 기존의 수식 에 더해 의사거리 로 표현할 수 있다.
또 다르게는 위성의 위치와 수신기의 위치를 유클리드 거리로 구함으로써 의사거리를 구할 수 있다. 위성의 위치를 ), 수신기의 위치를 라고 할 때 이다.
1.3. 의사거리 보정
이번엔 보정을 위한 식을 살펴보자.
식 은 시각과 위치에 의한 오차를 나타낼 것이다. 이를 활용할 것이다.
위치에 의해 거리를 계산한 식 을 테일러 급수로 미분하면, 가 되고, 아래 식처럼 선형화된 식으로 나타낼 수 있다. 여기서 'SV'는 Setellite Vehicle의 약자로, 분모 항은 몇 번째 위성의 위치와 유클리디 거리 차이인지를 나타낸다. Ephemeris 데이터로부터 위성의 위치를 계산할 수 있으므로, 수신기의 위치를 특정한다면 분자 역시 위성과 수신기의 위치 값으로 계산할 수 있다.

선형화된 위 식을 행렬로 표시하면 아래와 같다.

선형화 식에 Geometry Matrix인 g = 를 곱하면, 수신기의 위치와 시각 오차 성분을 측정된 의사거리 에러 성분이 된다.
해당 식을 반대로 생각해 보면 수신기위 실제 위치를 비교적 정확하게 구할 수 있다.
위 선형화 식에서 Geometry Matrix만 남기고 아래처럼 식을 바꾼다면, 의사 거리의 보정(오차)값에 어떤 행렬을 곱했을 때 수신기의 위치와 시각에 대한 보정값으로 환산이 된다.

가장 먼저, 초기 수신기 위치를 특정해 그곳에서 위성의 신호들을 측정해 성분을 얻는다. 그런 다음 로 를 얻어 이것이 곧 해당 위치와 시각에 대한 보정 성분이 된다. 이 보정 성분을 해당 위치의 신호에 더하면 새로운 위치와 시각을 얻게 된다.
새 위치를 얻게 되었으므로 그 위치에서의 위성까지의 거리도 바뀔 것이다. 그럼 다시 유클리드 거리, 를 새로 업데이트해야 하고, 차이로 가 구해질 수 있다.
로 다시 공식의 처음으로 돌아가 Geometry Matrix의 역행렬과 곱하면 다시 위치와 시각에 대한 보정 성분을 얻게 되는 과정이 반복된다. 이런 과정을 반복하다보면 어느 순간 가 매우 작아져 업데이트가 불필요할 시점이 온다. 통상적으로 4회 반복 후에 cm 단위로 업데이트된다.
위와 같은 선형화와 빠른 계산을 사용해 GPS 수신기는 빠르게 위치를 계산할 수 있다.
참고
- [Blog] GPS 이론: GNSS, RTK 등: https://velog.io/@717lumos/GPS-GPS-%EC%9D%B4%EB%A1%A0-GNSS-RTK-%EB%93%B1