![[ROS] gazebo clearpath jackal 모바일 로봇 사용하기(velodyne vlp16 3d lidar)](https://img1.daumcdn.net/thumb/R750x0/?scode=mtistory2&fname=https%3A%2F%2Fblog.kakaocdn.net%2Fdn%2FwlKCP%2Fbtsz51vLOu9%2FRS4qtEtkhkHZtzzBwaFA80%2Fimg.png)
💡 본 문서는 'gazebo clearpath jackal 모바일 로봇 사용하기(velodyne vlp16 3d lidar)'에 대해 정리해놓은 글입니다.
gazebe에서 clearpath jackal 모바일 로봇를 설정하여 필요한 센서를 추가하는 방법을 정리하였으니 참고하시기 바랍니다.
1. clearpath jackal: Launch (velodyne vlp16 3d lidar)
먼저 설치하여 사용하는 방법을 소개해드리고 다른 센서로 변경하는 방법을 설명하겠습니다.
ROS 버전은 noetic 기준으로 작성하였으며, 다른 버전의 경우 설치시 해당 버전으로 변경하여 설치하시면 됩니다.
1) INSTALLATION
jackal 패키지 설치
sudo apt-get install ros-noetic-jackal-simulator ros-noetic-jackal-desktop ros-noetic-jackal-navjackal 커스텀 패키지 설치(control, navigation, description, ...)
cd ~/catkin_ws/src/
git clone https://github.com/DrawingProcess/jackal2) LAUNCH GAZEBO
i) base robot
roslaunch jackal_gazebo jackal_world.launchii) base + 2d laser
roslaunch jackal_gazebo jackal_world.launch config:=front_laser
iii) base + 3d lidar
roslaunch jackal_gazebo jackal_world.launch config:=3d_lidar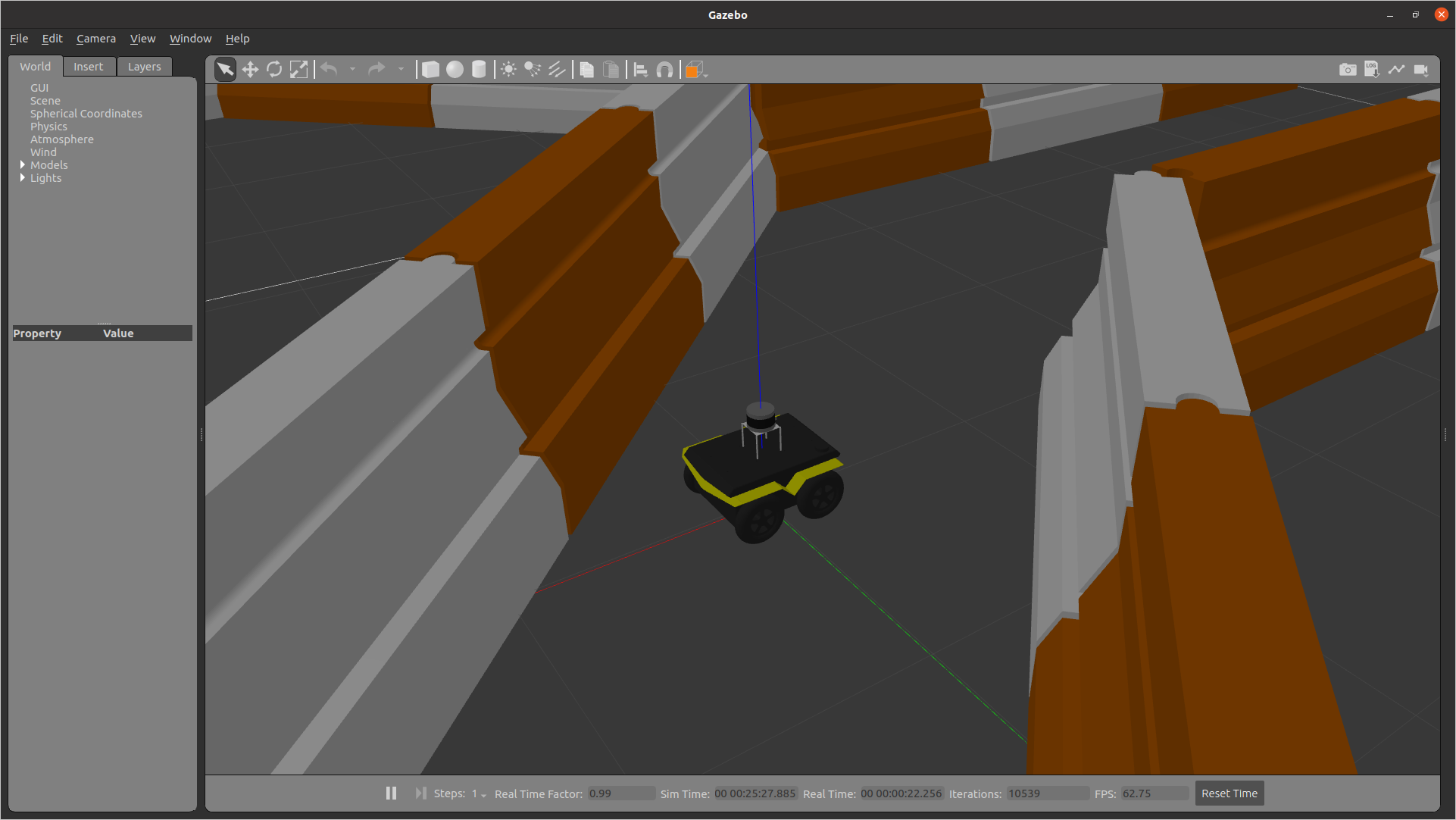
3) LAUNCH RVIZ
You can using the following launch invocation to start rviz with a pre-cooked configuration suitable for visualizing any standard Jackal config:
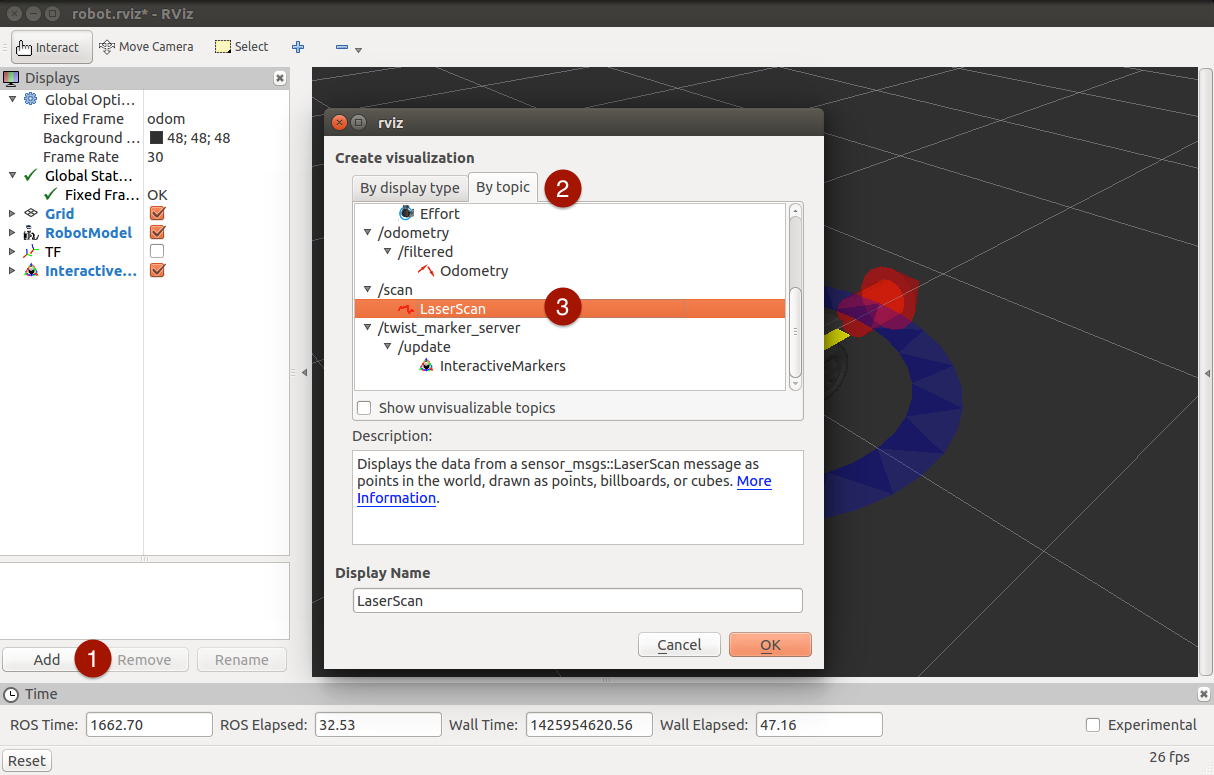
roslaunch jackal_viz view_robot.launch+ VISUALIZING SENSORS
click the “Add” button, then select the “Topics” tab, and then select the front/scan topic:
SLAM 및 navigation 관련 내용은 공식 문서인 '[clearpath] clearpath jackal'를 참고해주시면 감사하겠습니다.
2. clearpath jackal: Config (velodyne vlp16 3d lidar)
먼저 jackal에서 제공하는 센서는 다음과 같으며, 센서들의 parameter는 '[clearpath] JACKAL_DESCRIPTION PACKAGE'에 정의되어있으니 자세한 내용은 해당 부분 참고하시기 바랍니다.
1) 센서 파라미터 직접 변경
기본적인 jackal 모델은 jackal.urdf.xacro에 정의되어 있으며, 추가적인 센서는 accessories.urdf.xacro에 정의되어 있습니다. 추가적인 센서 설정 및 해당 변수를 변경하고 싶다면 accessories.urdf.xacro 파일을 확인하시면 됩니다.
- jackal.urdf.xacro 위치: jackal/jackal_description/urdf/jackal.urdf.xacro
- accessories.urdf.xacro 위치: jackal/jackal_description/urdf/accessories.urdf.xacro
jackal.urdf.xacro 내부에서 accessories.urdf.xacro를 읽어들이기에 accessories.urdf.xacro 파일만 수정하면 센서를 추가할 수 있습니다.
<!-- Optional standard accessories, including their simulation data. The rendering
of these into the final description is controlled by optenv variables, which
default each one to off.-->
<xacro:include filename="$(find jackal_description)/urdf/accessories.urdf.xacro" />이제 3D 라이다 센서를 사용하도록 설정해보도록 하겠습니다. accessories.urdf.xacro 파일을 확인해보면 JACKAL_LASER_3D이 정의 되어있는 것을 확인할 수 있습니다. 해당 변수를 1로만 수정하면 3D lidar를 사용할 수 있습니다.
<!--
Add a 3D lidar sensor. By default this is a Velodyne VLP16 but can be changed with the
JACKAL_LASER_3D_MODEL environment variable. Valid model designations are:
- vlp16 (default) :: Velodyne VLP16
- vlp32e :: Velodyne HDL-32E
-->
<xacro:if value="$(optenv JACKAL_LASER_3D 0)">
<xacro:property name="mount" value="$(optenv JACKAL_LASER_3D_MOUNT mid)" />
<xacro:property name="topic" value="$(optenv JACKAL_LASER_3D_TOPIC mid/points)" />
<xacro:property name="tower" value="$(optenv JACKAL_LASER_3D_TOWER 1)" />
<xacro:property name="prefix" value="$(optenv JACKAL_LASER_3D_PREFIX ${mount})" />
<xacro:property name="parent" value="$(optenv JACKAL_LASER_3D_PARENT ${mount}_mount)" />
<xacro:property name="lidar_3d_model" value="$(optenv JACKAL_LASER_3D_MODEL vlp16)" />
<!-- Velodyne VLP16 -->
<xacro:if value="${lidar_3d_model == 'vlp16'}">
<xacro:vlp16_mount topic="${topic}" tower="${tower}" prefix="${prefix}" parent_link="${parent}" >
<origin xyz="$(optenv JACKAL_LASER_3D_OFFSET 0 0 0)" rpy="$(optenv JACKAL_LASER_3D_RPY 0 0 0)" />
</xacro:vlp16_mount>
</xacro:if>
<!-- Velodyne HDL-32E -->
<xacro:if value="${lidar_3d_model == 'hdl32e'}">
<xacro:hdl32e_mount topic="${topic}" tower="${tower}" prefix="${prefix}" parent_link="${parent}" >
<origin xyz="$(optenv JACKAL_LASER_3D_OFFSET 0 0 0)" rpy="$(optenv JACKAL_LASER_3D_RPY 0 0 0)" />
</xacro:hdl32e_mount>
</xacro:if>
</xacro:if>매우 간단하죠? 그런데 해당 방법은 나중에 이를 복구하기 위해서는 수정한 부분을 일일이 다시 수정해주어야 합니다. 따라서 config 파일을 두어 config 값을 지정하여 실행하는 방법을 설명하겠습니다.
2) config 값 읽어오기
앞서 2d lidar 가 적용되어 있는 모델을 불러오기 위해서 다음과 같은 명령어를 사용했습니다.
roslaunch jackal_gazebo jackal_world.launch config:=front_laser여기서 front_laser config는 뭘까요? find command로 확인해보면 다음의 경로에 해당 파일이 있는 것을 확인할 수 있습니다.
~/catkin_ws/src/jackal$ find . | grep front_laser
./jackal_description/urdf/configs/front_laser
./jackal_description/urdf/configs/front_laser.bat이후 각 파일을 확인해보면, 앞서 accessories.urdf.xacro 파일에 <xacro:if value="$(optenv JACKAL_LASER 0)">처럼 정의 되어있던 optenv 변수를 설정하는 파일인 것을 확인할 수 있습니다.
~/catkin_ws/src/jackal$ cat ./jackal_description/urdf/configs/front_laser.bat
@echo off
REM The front_laser configuration of Jackal is sufficient for
REM basic gmapping and navigation. It is mostly the default
REM config, but with a SICK LMS100 series LIDAR on the front,
REM pointing forward.
set JACKAL_LASER=1따라서 이와 유사하게 3d_lidar, 3d_lidar.bat 파일을 만들어주면 됩니다.
$ nano jackal/jackal_description/urdf/configs/3d_lidar
# The front_laser configuration of Jackal is sufficient for
# basic gmapping and navigation. It is mostly the default
# config, but with a SICK LMS100 series LIDAR on the front,
# pointing forward.
JACKAL_LASER_3D=1
JACKAL_LASER_3D_TOPIC="/velodyne_points"$ nano jackal/jackal_description/urdf/configs/3d_lidar.bat
@echo off
REM The front_laser configuration of Jackal is sufficient for
REM basic gmapping and navigation. It is mostly the default
REM config, but with a SICK LMS100 series LIDAR on the front,
REM pointing forward.
set JACKAL_LASER_3D=1
set JACKAL_LASER_3D_TOPIC="/velodyne_points"그리고 다음의 명령어로 실행하면 3d lidar가 적용된 모델을 확인할 수 있습니다.
roslaunch jackal_gazebo jackal_world.launch config:=3d_lidar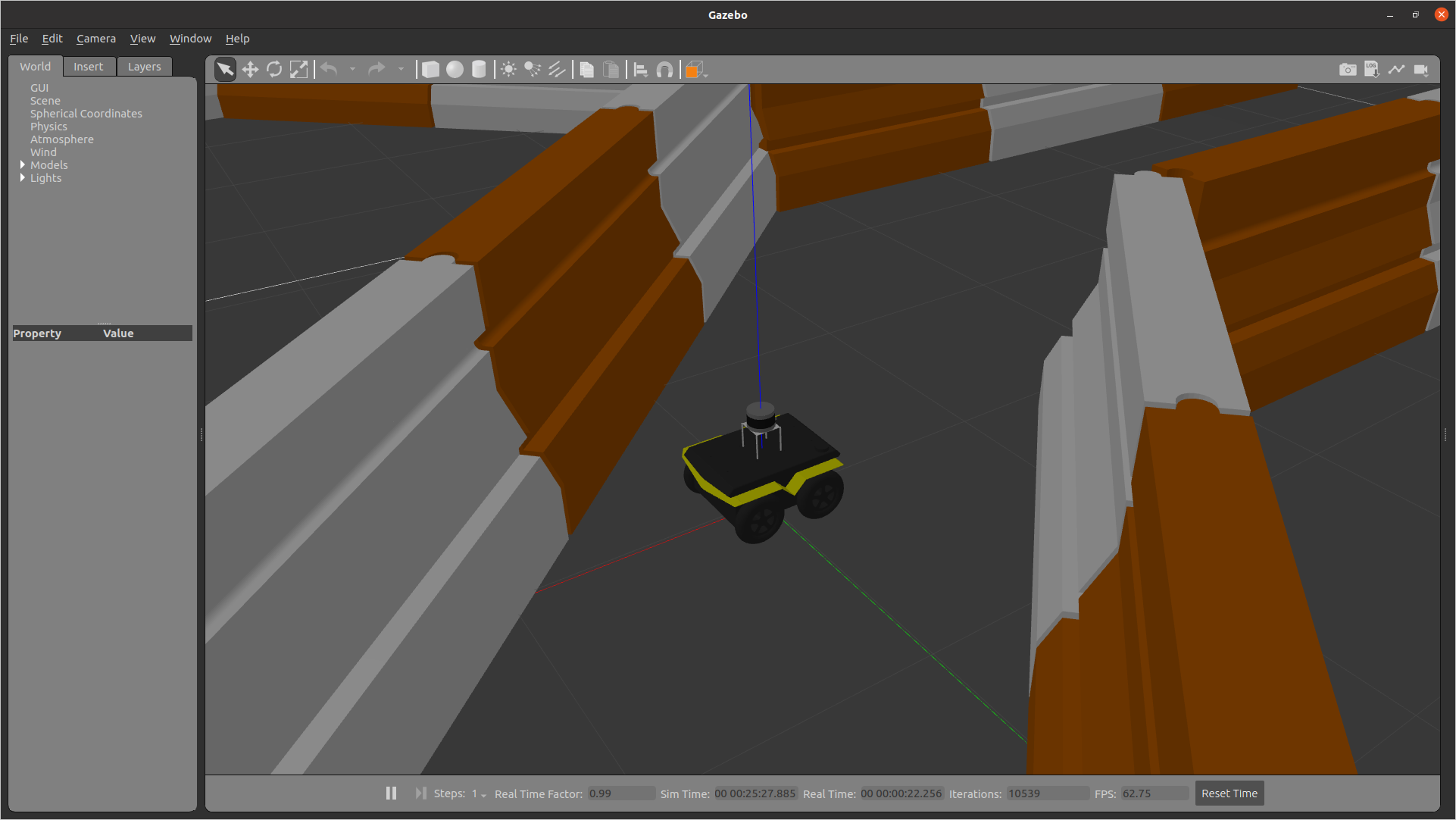
참고
- [clearpath] clearpath jackal: https://www.clearpathrobotics.com/assets/guides/noetic/jackal/simulation.html
- [clearpath] clearpath jackal navigation: https://www.clearpathrobotics.com/assets/guides/noetic/jackal/cartographer.html
- [clearpath] JACKAL_DESCRIPTION PACKAGE: https://www.clearpathrobotics.com/assets/guides/noetic/jackal/description.html
- [github] DrawingProcess/jackal: https://github.com/DrawingProcess/jackal
'Study: Robotics(Robot) > Robot: ROS(Robot Operating Sytem)' 카테고리의 다른 글
| [ROS] ROS 2 Humble & Gazebo 11 설치 및 세팅 (0) | 2024.03.17 |
|---|---|
| [ROS] apt 설치한 패키지와 build한 패키지(catkin, colcon) 중 어떤 것을 사용? (0) | 2023.11.10 |
| [ROS] ROS URDF vs. Gazebo SDF: Link Pose, Joint Pose, Visual & Collision (0) | 2023.10.27 |
| [ROS] ROS TF 좌표계 및 변환 (0) | 2023.10.26 |
| [ROS] ROS rosrun 실행파일 만들기(python, cpp) (0) | 2023.10.12 |